The movement and collisions work as input-factors for
certain computer-controlled operations. These operations will influence the
happening in and around the bumper-car setup.
Therefore, we need a motion-capturing system connected to the vehicles in order to determine their
movement and position.
The vehicles drive on a bounded rectangular surface according
to an x/y system of co-ordinates.
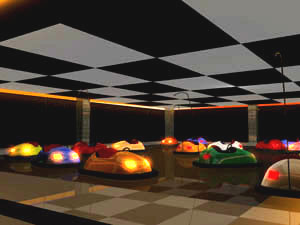
In the fair area in front of the AEC a bumper-car ride will be installed.
During the festival the bumper-car will be working in the
evening to the pleasure of passers-by and guests of the festival.

To every vehicle an x/y position will be related.
Ideally, up to 20 vehicles can be processed at the same time.
Perhaps, a differentiation of the vehicles could result in a registration of the z-axis.
A possibility for the registration of all 3 axes could be: for example colored markers could be installed on the vertical which supply the cars with electricity.
Inside of the autodrom, due to the metal construction, there exists a magnetic field which probably complicates the magnetic and radio-engineering. The floor is made of steel-plates and the ceiling is made of a stretched metallic net. This is how the vehicles are supplied with power.
Because of these circumstances we are thinking of an optical acceptance system. The localization of the x/y co-ordinates should be possible by positioning cameras alongside and cross-side. The z-axis parameter for the differentiation of the several vehicles can be determined by fixing the position points on the vertical poles in different heights.
Furthermore, it`s necessary to catch the bumpercars-collisions. By installing simple contacts on the cars, a flash could be triggered on collision.
The flash (infra-red) works as a pulse generator for the optical acceptance system and the collision is registered.
